

Les robots parallèles à câbles se positionnent comme une technologie complémentaire aux autre solutions robotiques telles que les bras 4,5 ou 6 axes. Ils sont économiques, peu encombrants et offrent des caractéristiques intéressantes : embarquer des charges lourdes, les déplacer sur de grandes distances très rapidement, contrôler leur orientation/position, sans phénomène de ballant. Le robot à câbles le plus connu est celui utilisé dans les stades de sport pour filmer directement le coeur de l’action.
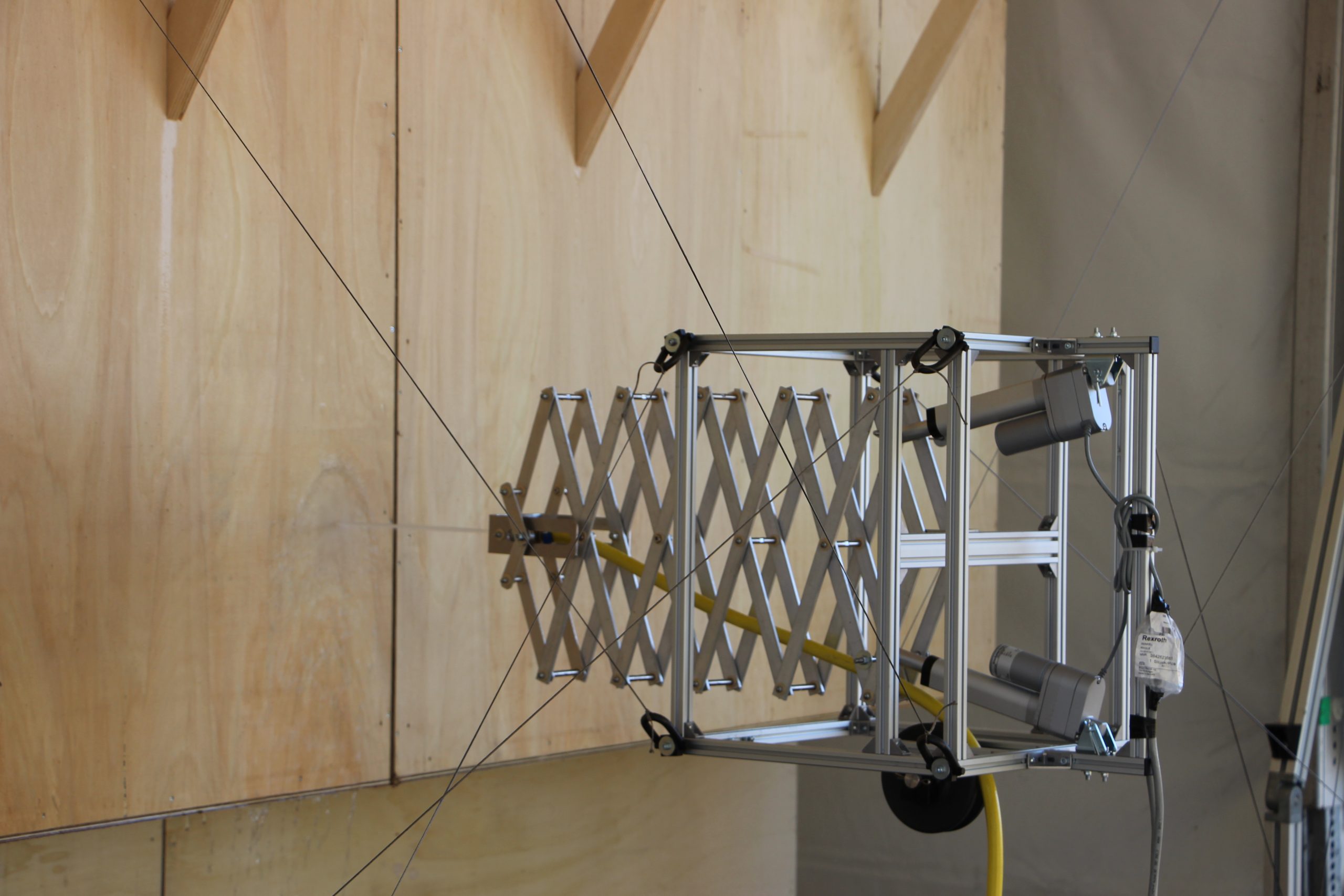
Le projet ROCKET vise à développer un robot parallèle à câbles industriel avec son effecteur de saisie, dédié à la manipulation et au tri de tôles de grandes dimensions au moyen d’une interface Homme/machine enrichie de réalité augmentée.


Les résultats
Le projet a conduit à la mise au point d’un premier démonstrateur opérationnel qui va permettre de présenter à des industriels les potentialités d’usage de la technologie des robots parallèles à câbles pour des applications diverses (manipulation, contrôle, opérations de lavage…). Dans notre démarche globale de valorisation des RPC, les résultats de ce projet permettront, par ailleurs, de définir une approche technique et économique sur le coût et le prix d’appareils pouvant être mis en œuvre par des intégrateurs.
Les principaux travaux scientifiques du projet ROCKET ont été réalisés dans le cadre d’une thèse de doctorat. Les résultats, concernant essentiellement le contrôle-commande du robot parallèle à câbles, vont être réutilisés dans le cadre d’un autre projet où ce type de robots est expérimenté. Une partie de ces travaux, se focalisant sur l’aspect sécurité des robots parallèles à câbles et notamment la gestion de leur arrêt d’urgence, constitue le point de départ d’un nouveau projet, aujourd’hui en montage, dont le volet sécurité représente une partie significative des résultats attendus.
Impacts industriels
- 2 fois moins cher que les système classiques actuels
- Cadence 3 fois plus rapide du tri des tôles
- Meilleur contrôle des objets : position, ergonomie, traçabilité
Valorisations
Expertises
- Robotique, Cobotique et Réalité Augmentée
Les partenaires
- IRT Jules Verne
- B&R
- Clarté
- Clemessy
- Les Chantiers de l’Atlantique
- CNRS