

Initié en septembre 2016 dans le cadre du projet européen ECHORD ++, le projet FASTKIT, mené par l’IRT Jules Verne et le CNRS, s’est achevé début 2018. L’objectif du projet de recherche est de développer une solution robotique polyvalente et à faible coût pour la logistique, en utilisant une combinaison unique d’un robot mobile et d’un robot parallèle à câbles.
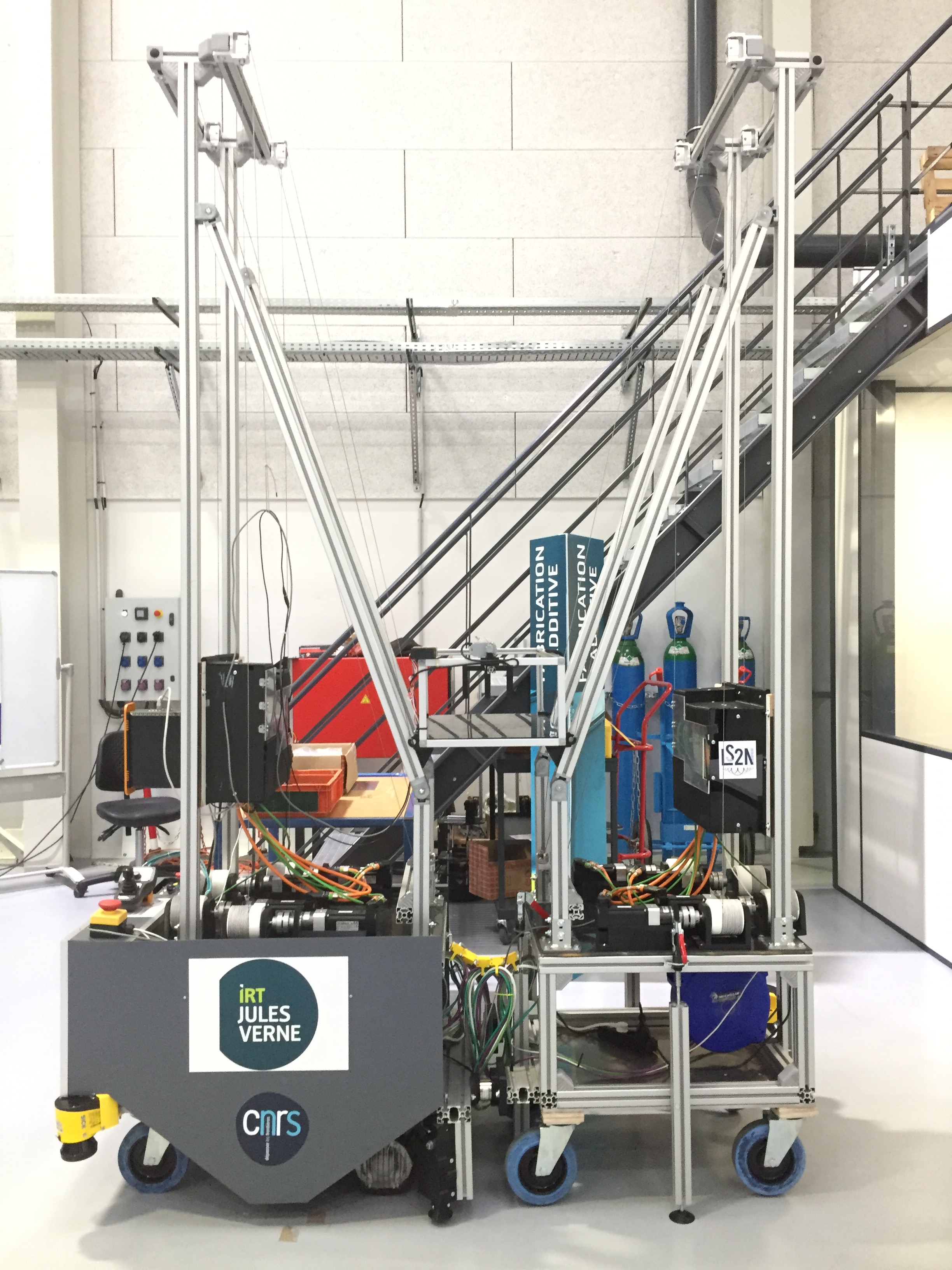
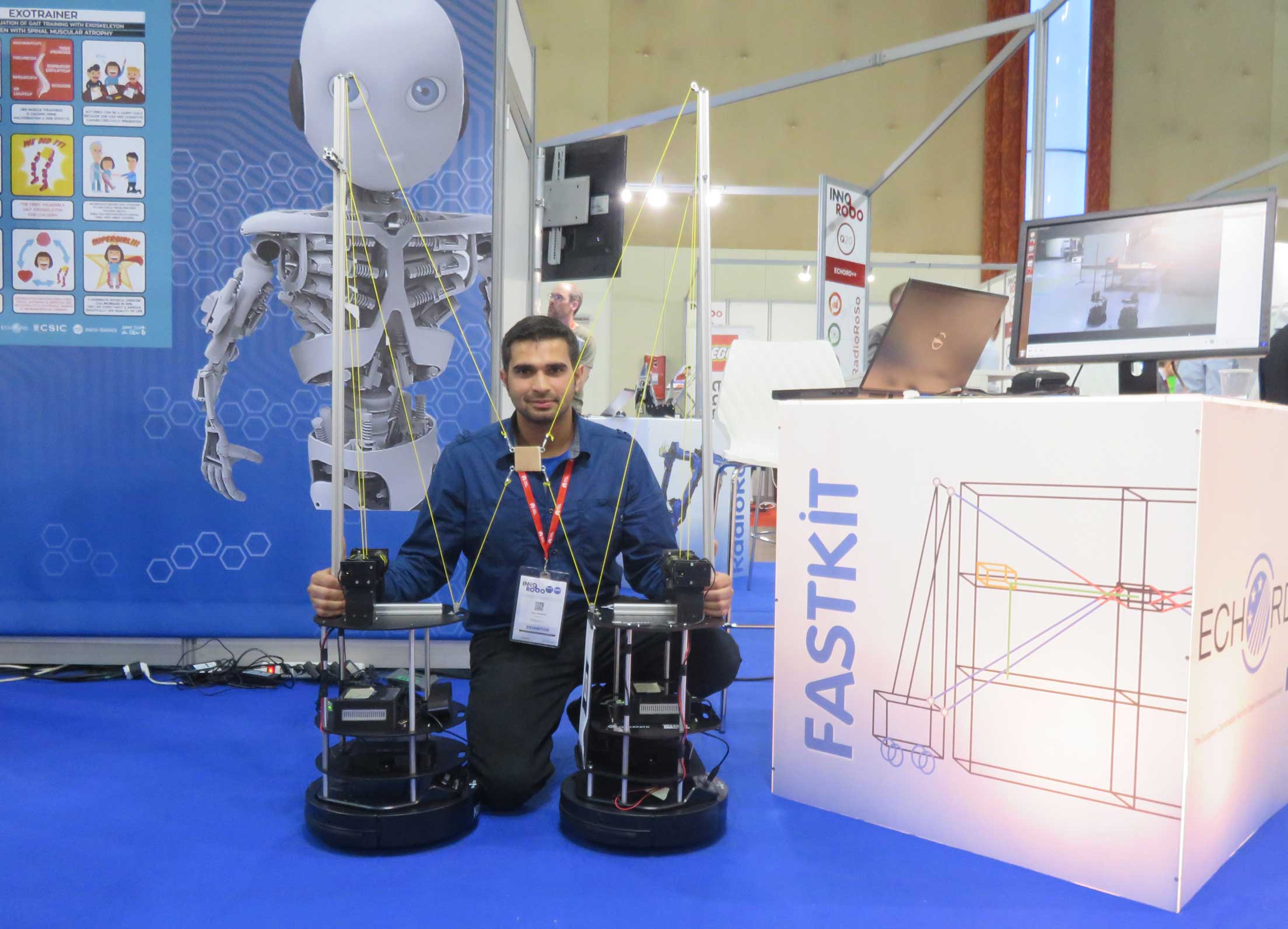
Véritable démonstrateur opérationnel, FASTKIT est un robot parallèle à câbles mobile pensé pour répondre aux besoins émergents des industriels de disposer de solutions techniques automatisées de préparation de commandes.
Les résultats
Résultat d’un an et demi de recherche, FASTKIT combine l’autonomie d’un robot mobile et les fonctionnalités d’un robot parallèle à câbles.
Le prototype FASKIT présente les avantages d’être reconfigurable en fonction de son espace de travail et d’être flexible en hauteur, en charge et en vitesse. La structure est à la fois et légère et robuste et demande un faible coût d’investissement.
Impacts industriels
- Réduction des délais des opérations par rapport aux robots sur AGV
- Réduction des coûts d’investissement
- Création de startup
Valorisations
- Visionner les vidéos du projet FASTKIT
- Consulter le site web dédié au projet FASTKIT : www.fastkit-project.eu
Expertises
- Robotique & Cobotique
- Modélisation & Simulation
- Procédés Composites
- Procédés Métalliques
Les partenaires
- TUD (DE)
- CNRS (FR)
- IRT Jules Verne (FR)