

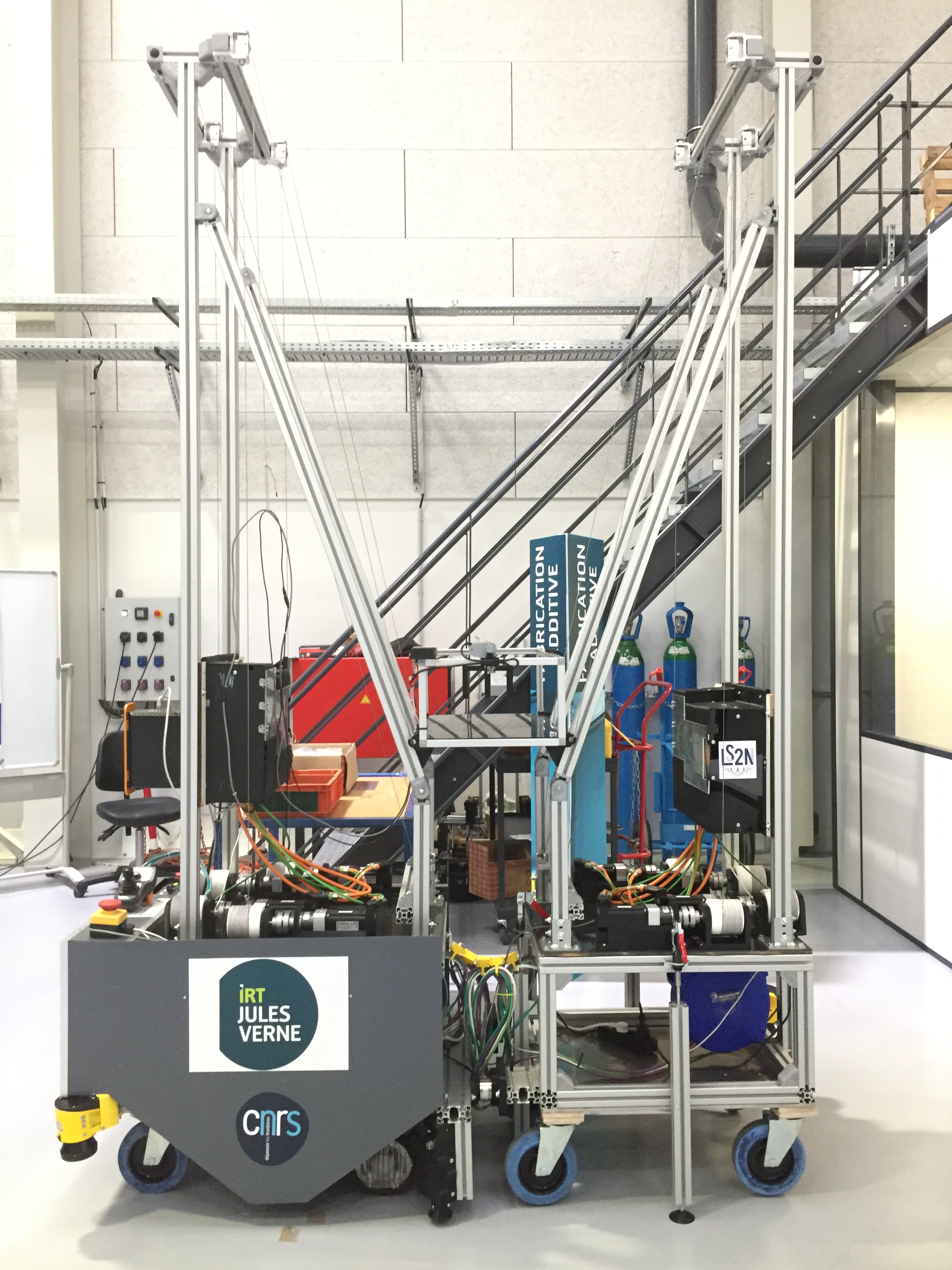
Initiated in September 2016 as part of the European project ECHORD ++, the FASTKIT project, led by IRT Jules Verne and the CNRS, was completed in early 2018. The objective of the research project is to develop a versatile and low-cost robotic solution for logistics, using a unique combination of a mobile robot and a cable driven parallel robot.
As a real operational demonstrator, FASTKIT is a mobile cable driven parallel robot designed to meet the emerging needs of manufacturers for automated technical solutions for order picking.

Les résultats
Results after a year and a half of research : FASTKIT combines the autonomy of a mobile robot and the functionalities of a cable driven parallel robot.
The FASKIT prototype has the advantages of being reconfigurable according to its workspace and flexible in height, load and speed. The structure is both light and robust and requires a low investment cost.
Industrial impacts
- Reduction in lead time of operations compared to robots based on AGV
- Reduction in investment costs
- Creation of start up
Valorisations
- Watch the videos about the FASTKIT project
- Visit the website of the FASTKIT project: www.fastkit-project.eu
Expertise
- Robotics & Cobotics
- Modelling & Simulation
- Composite processes
- Metal processes
Partners
- TUD (DE)
- CNRS (FR)
- IRT Jules Verne (FR)